Ziel
Entwicklung eines vollelektrischen, leisen, leichten, hocheffizienten Industriegreifers der Reinraumgeeignet ist. Ermöglicht wird dies durch den Einsatz von FGL-Technologie.
Ergebnis
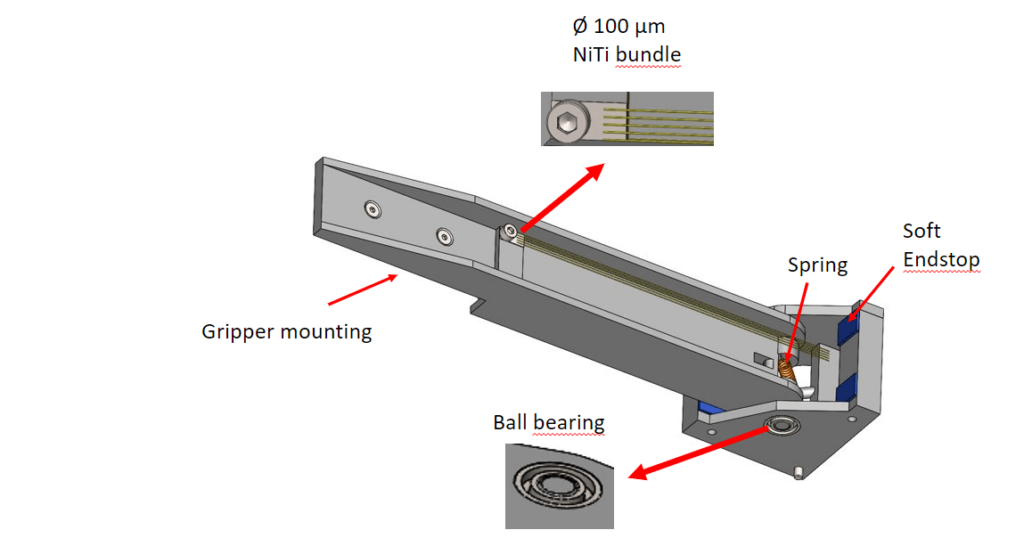
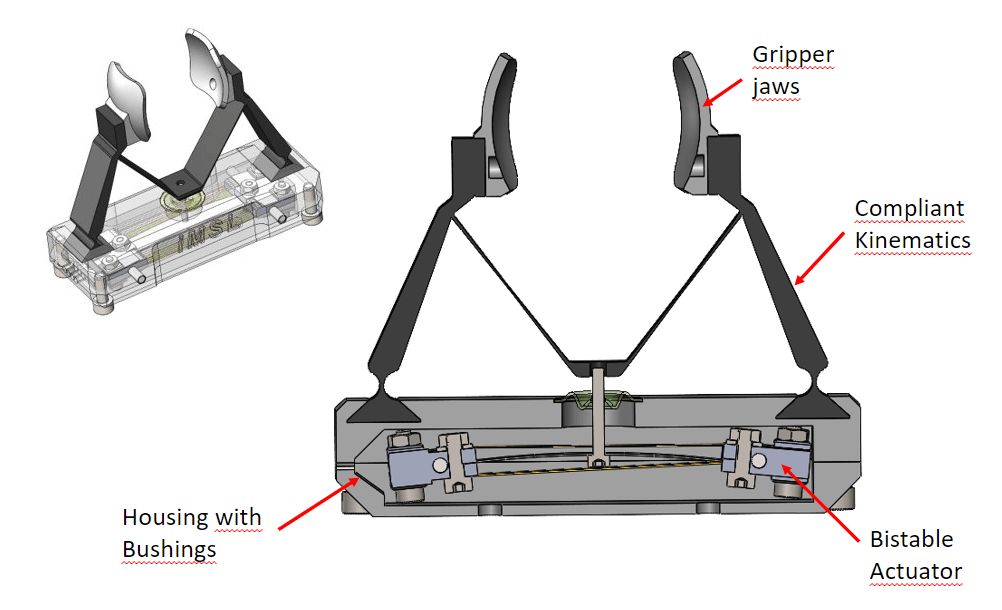
- Bistabiler Industriegreifer mit FGL-Antrieb (4 N Greifkraft, 12 mm Öffnungshub)
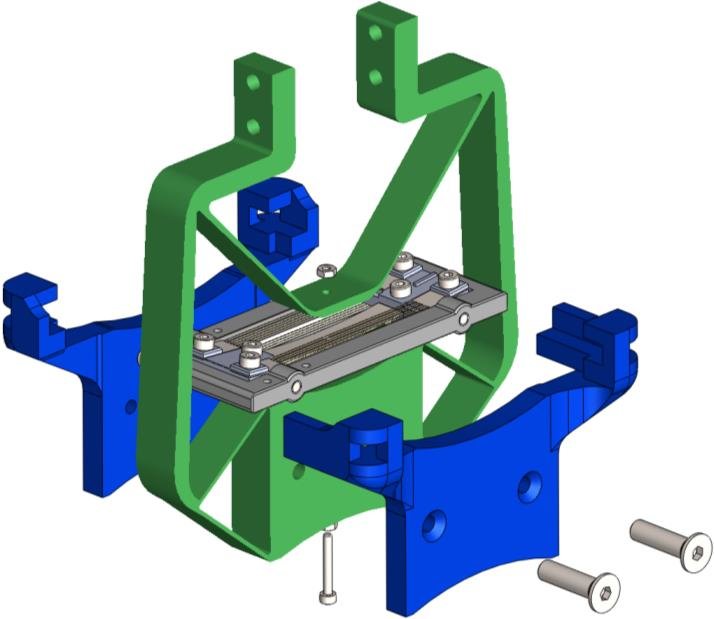
- Mechanik aus Festkörpergelenken
- Mit 35 g Gesamtgewicht extrem leicht
- 90% Energieersparnis im Vergleich zu Standard-Pneumatikgreifern
Ausblick
Durch die Skalierbarkeit in Größe, Hub und Kraft sowie austauschbare Greifbacken lässt sich der Greifer an zahlreiche Anforderungen anpassen. Integration von Health Monitoring und Überwachung mittels Self-Sensing sind die wichtigsten nächsten Schritte. Die Technologie ist soweit ausgereift, dass im nächsten Schritt Lebensdauer- und Feldversuche mit dem System anstehen. Des Weiteren müssen die Materialauswahl von Gehäuse und Kinematik an Industriestandards angepasst werden.
Anwendungsbereiche
- Mobile Anwendungen (Drohnen, Smart Home, etc.)
- Raum- und Luftfahrt
- Prothesen, E-Mobility
Entwickelt von
Dominik Scholtes, Carmelo Piritano, Andre Schieler