Ziel
Aufbau eines DEA-basierten Ventils. Ein konventioneller Ventil-Körper soll durch einen DE-Aktor angesteuert werden. Das Ventil kann durch Anlegen einer elektrischen Spannung geöffnet und geschlossen werden. In einem Demonstratoraufbau soll dieser Aktor genutzt werden, um einen Luftstrom durch das Ventil zu blockieren oder zu ermöglichen. Die ausströmende Luft wird durch eine leichtgängige Klappe am Ausgang des Ventils visualisiert (Luft strömt à Klappe wird durch den Luftstrom geöffnet und „flattert“)
Ergbenis
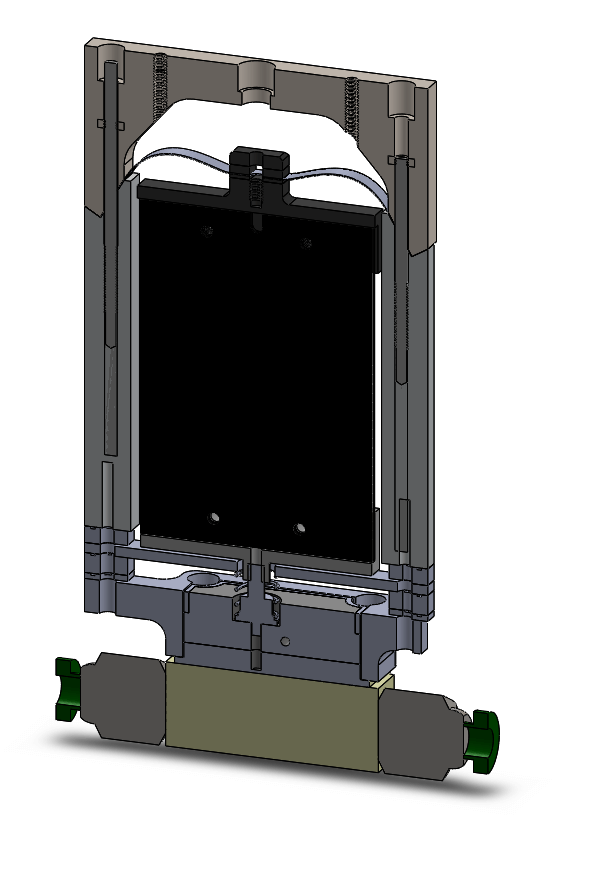
- DE-Aktor basierend auf Streifen-DE (strip in-plane)
- Umsetzung eines neuartiges Aktor-Konzepts (floating actuator), wodurch der Kraft-Output des Aktors vergrößert wurde
- Funktionierendes DE-Ventil, bestehend aus DE-Aktor & kommerziellem Ventilkörper
Ausblick
Das Projekt zeigt eindrucksvoll die weitreichenden möglichen Anwendungen von DE-Aktoren. Insbesondere für Ventil Anwendungen, bei denen teilweise große Flüsse ermöglicht werden müssen (d.h. es werden große Hübe benötigt) und gleichzeitig auch hohe Drücke herrschen (d.h. es wird eine große Kraft benötigt) kann ein DE-Aktor eine effiziente Lösung darstellen. Anpassungen des Aktors könnten weitere Anwendungen für den Bereich Pneumatik möglich machen.
Anwendungsbereiche
Alle Arten von mechanischen Schaltern und Ventilen
Entwickelt von
Dr. Steffen Hau